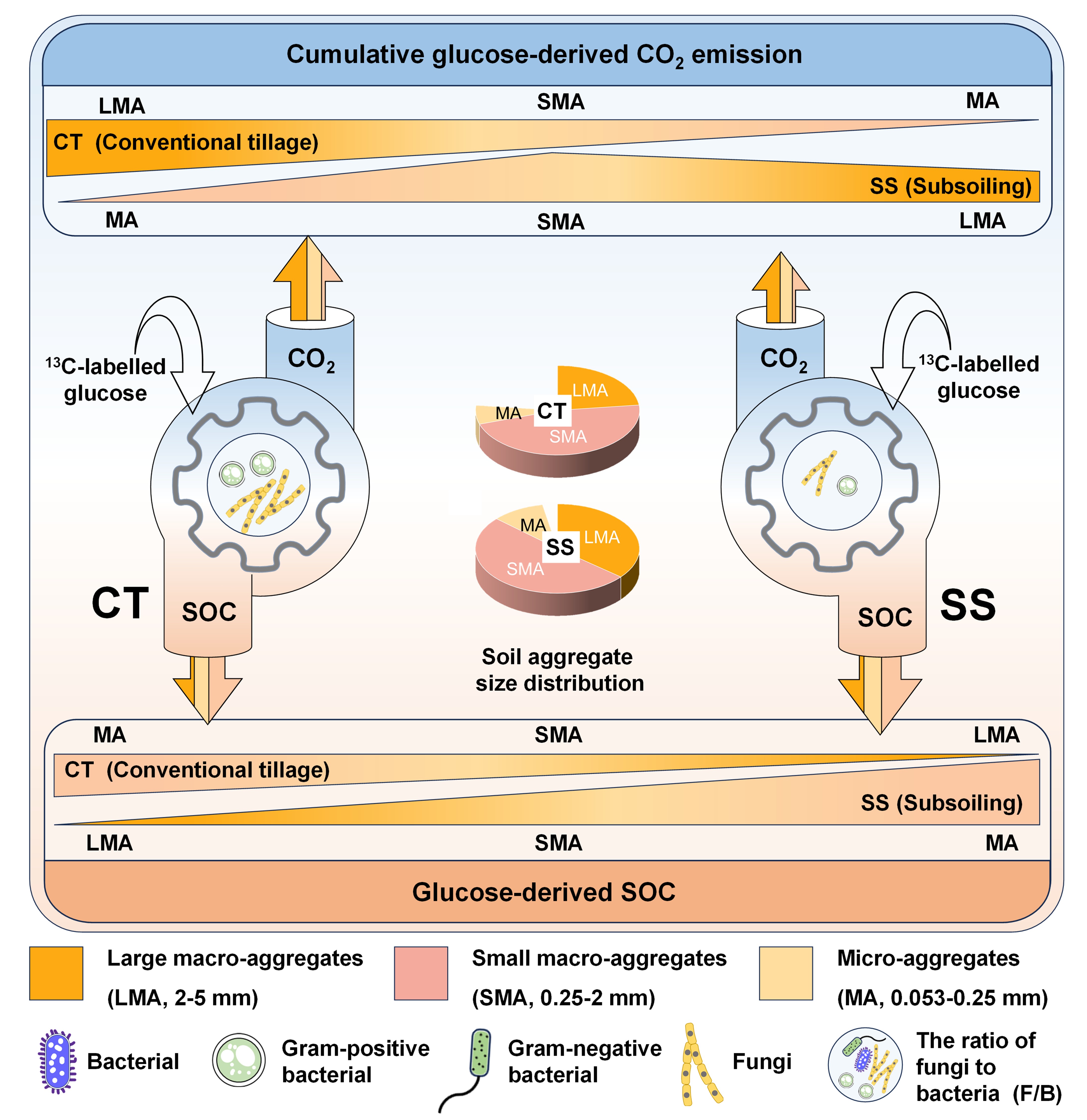
近日,农学院韩惠芳教授研究团队在Agriculture, Ecosystems Environment在线发表了题为“Potential carbon sequestration promoted by subsoiling: Tracing the fate of exogenous glucose and priming effect in soil aggregates”的研究论文。在读博士生刘新坤为论文第一作者,韩惠芳教授为通讯作者。深松耕作(subsoiling)作为一种保护性耕作措施,通过打破犁底层、改善土壤结构,已被广泛应用于农田土壤改良和作物增产。然而,深松究竟如何影响外源有机碳在土壤团聚体中的转化与固存,其背后的微生物驱动机制尚不清楚。本研究通过13C同位素标记葡萄糖示踪技术,结合磷脂脂肪酸(PLFA)分析方法,揭示了深松耕作调控土壤团聚体激发效应(Priming Effect)及碳平衡的新机制。研究发现,添加的外源葡萄糖在不同粒径土壤团聚体中的命运存在显著差异:65%–100%的葡萄糖在土壤团聚体中被分解,其中47%–93%以CO2形式释放,仅7%–26%转化为土
2026-07-16