

近日,机械与电子工程学院宋月鹏教授团队在《AGRICULTURE-BASEL》在线发表了题为“ Analysis of Operating Conditions for Vibration of a Self-Propelled Monorail Branch Chipper ”的研究论文。宋月鹏教授为该论文的通讯作者,研究生公彦晨为该文章的第一作者。
丘陵山区果品产业是乡村振兴、建设农村农业现代化重要组成部分,果树管理过程中的剪枝与枝条疏除作业会产生大量生物质资源,由于地形条件及设备作业稳定性差等因素限制,这些生物质资源不能得到有效利用。因此,亟需研制一种适用于丘陵果园远程遥控自走式枝条粉碎还田的设备,并确保其稳定作业。
目前,丘陵山区果园输运系统一般采用绞轮式远程遥控单轨牵引车,横向尺寸小,对地面压迫小,受软质路面影响小;较履带式作业机械适应能力强,受坑洼路面影响小;较双轨牵引车占地面积小,布置更加灵活,但是功能比较单一,因此,团队基于远程遥控单轨输运系统,开发了一套丘陵山区果园枝条粉碎机。
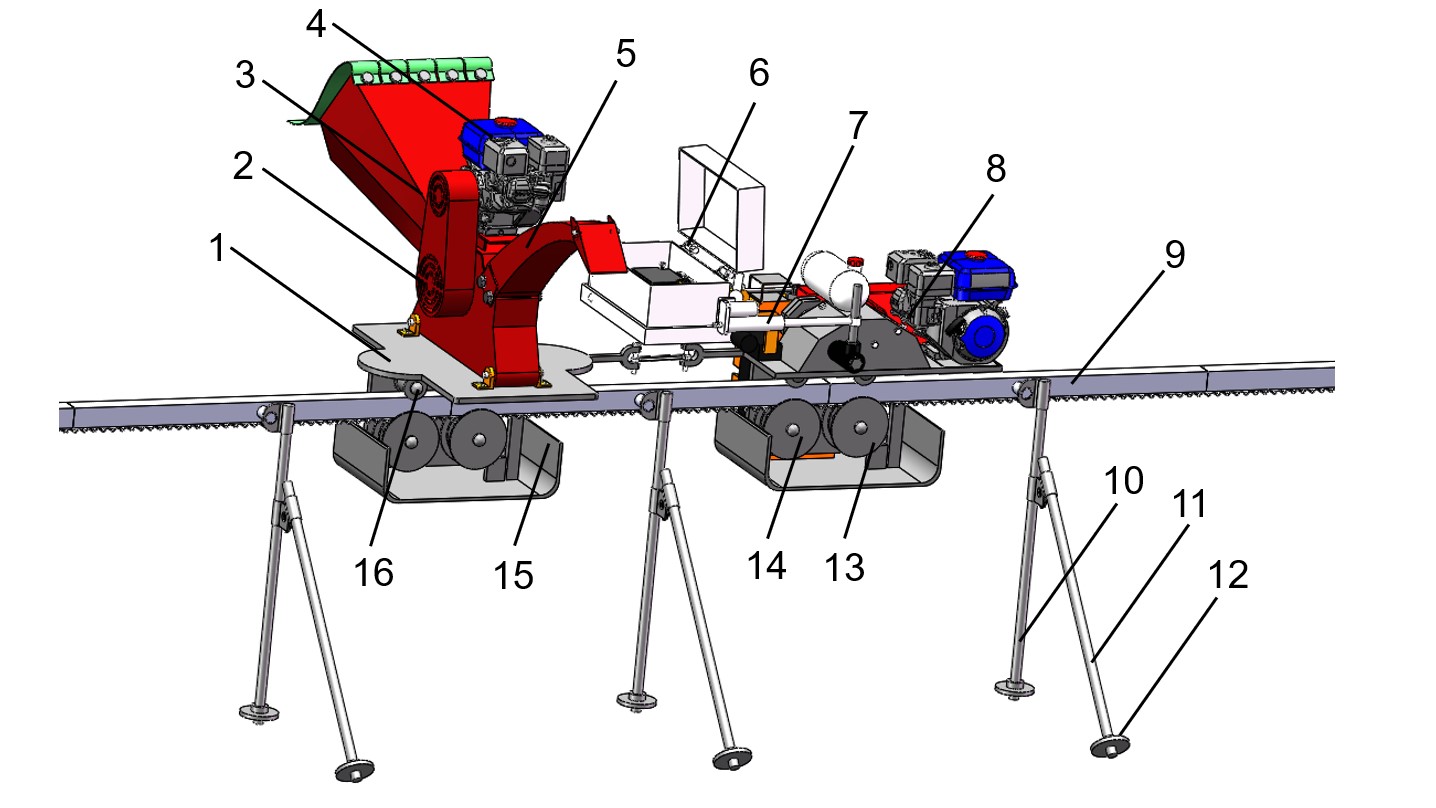
图1. 自走式单轨枝条粉碎机的总体结构
研究表明,自走式单轨枝条粉碎机稳定作业与轨道的节数有密切关系,计算机数值模拟仿真结果分析显示,在支撑杆底部刚性固定条件下,轨道系统固有频率与轨道节数相关,随轨道节数增加,各阶固有频率降低,其中1-4节降低较为明显,当达到一定数量时,振型变化趋于平缓。对于小于4节的远端短轨分支,应增加侧向枝杆数量以降低运行及作业振动性。
研制了远程遥控单轨自走式枝条粉碎机样机,并根据模态分析结果进行果园内轨道搭建,进行田间作业时的实际振动水平测试。振动测试结果表明,行走保护架处的振动幅度最大,最大值出现于沿横轨左右方向,最大值为21.5 m/s2。根据试验结果,应增加侧向辅助支撑杆以进一步实现稳定作业。
基于计算机数值虚拟仿真与田间试验相结合,研制出适用于丘陵山区果园远程遥控自走式单轨枝条粉碎机并进行了田间试验,同时探究了其稳定作业机制。据悉,该套设备已在青岛市崂山区北宅街道下葛场村建立了示范应用基地,使用效果良好。研究成果对提升丘陵山区农作物生物质资源利用,提高土壤有机质肥力,促进农业生产提质增效及绿色发展至关重要。
本研究受十三五国家重点研发计划、山东省自然科学基金项目、山东省现代农业产业技术体系创新团队专项—果品创新团队专项资金的支持。
文章链接:https://doi.org/10.3390/agriculture13010101
编 辑:万 千
审 核:贾 波





