

近日,机械与电子工程学院刘雪美教授团队在《Journal of Field Robotics》,发表题为“A Breeding Cotton Harvesting Robot: Design, Integration, and Field Evaluation”的最新研究成果。硕士研究生卢国航为第一作者,机电学院刘雪美教授为文章通讯作者,苑进教授、范嘉玮硕士生、戴念祖博士生参与了本课题研究。
棉花作为我国重要的经济作物,在中东部及黄淮海等地区广泛种植。然而,由于棉铃成熟期不一致、采收需分批进行,加之育种田地块小、分布零散,传统大型采棉机难以进场作业或无法实现多次高质量选择性采收。目前,小地块育种材料的采收仍以人工为主,不仅劳动强度大、成本高,而且在多风多雨天气条件下易发生采收延误,导致品质下降甚至减产风险。多批次、选择性、精准化采收已成为制约小规模棉花机械化的关键瓶颈。
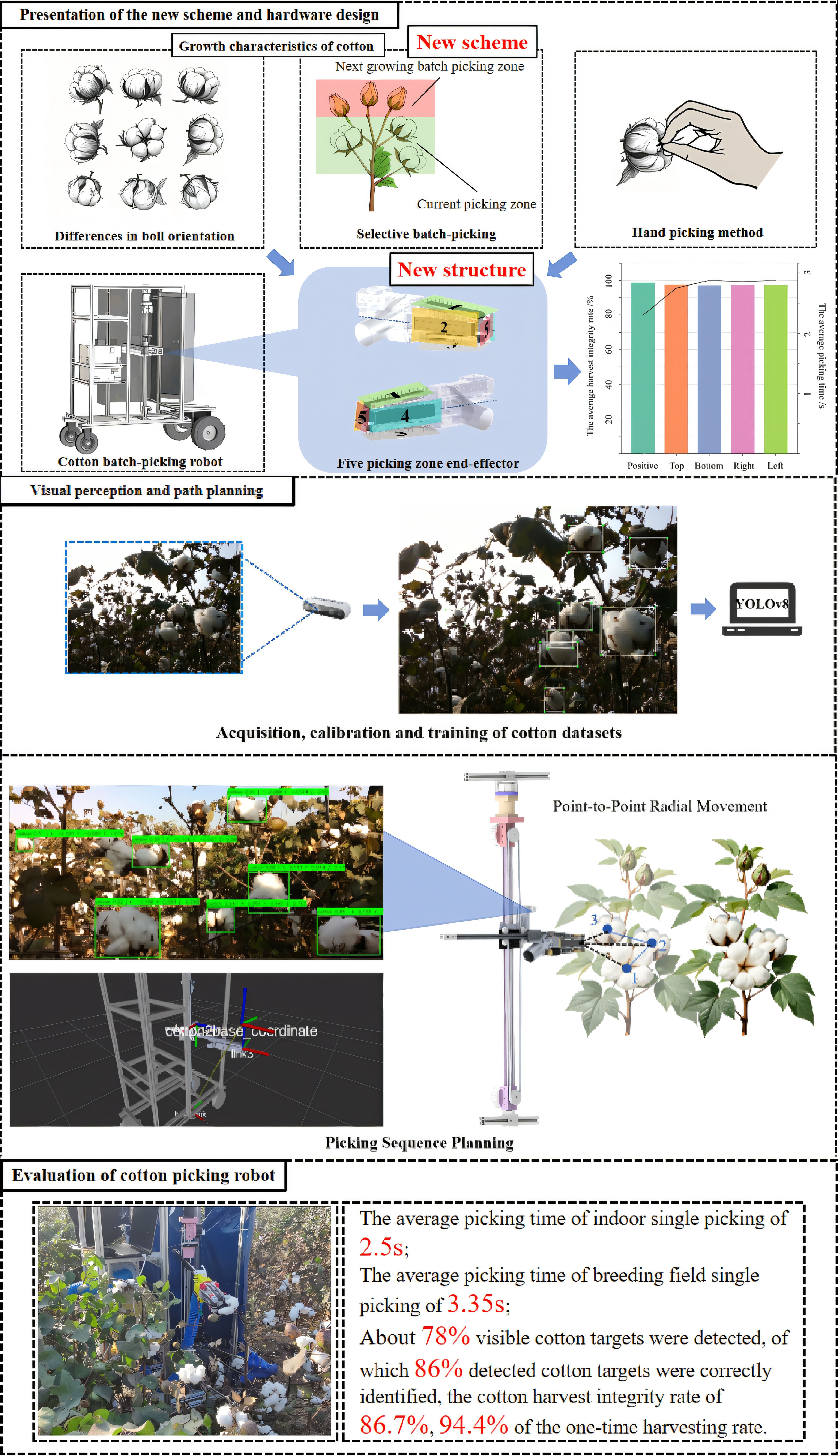
不同于规模化一次性采收的大型采棉装备,小地块棉花采收具有“成熟离散、空间分散、姿态多样”的特点。棉铃分布高度随机,成熟时间差异显著,采收过程具有明显的离散性和不确定性,难以实现类似批量作业的高速连续采摘。
针对小地块棉花多批次选择性采收的技术难题,研究团队提出了一种创新性的机械化采收方案。团队设计了基于五采摘区(FPZ)结构的末端执行器,通过多采摘区协同作业,实现不同姿态棉铃的高效选择性采摘;结合多批次采收方式,能够针对成熟期差异明显的棉铃进行分期采摘。同时,团队构建了基于ROS2的多机械臂选择性采收智能控制系统,完成了软硬件集成、调试与优化。该研究通过结构创新与作业模式创新结合,突破了小地块棉花多批次选择性采收的关键技术瓶颈,为分散种植区域提供了可行的机械化解决方案,也为提升棉花育种效率、降低人工成本、推动棉花采收智能化发展奠定了技术基础。随着技术在育种田块的成熟与优化,未来有望推广至分散种植或大面积生产区域,实现小批次智能采收向规模化机械化采收的转化,提升区域棉花生产效率和产品品质,推动棉花产业智能化升级。
该研究得到了国家自然科学基金、“十四五”国家重点研发计划、山东省棉花产业技术体系创新团队机械岗位专家项目和山东省农机研发制造推广应用一体化试点项目的资助。
编 辑:万 千
审 核:贾 波





